EXPERIMENTELLES VORGEHEN!
Dieses Vorgehen entspricht nicht den Herstellervorgaben zu einer richtigen Kalibrierung. Wir übernehmen hierbei keine Haftung. Die Nutzung des Vorgehen geschieht dabei auf eigene Gefahr!
¶ 2Q0 907 572 - Dynamische Kalibrierung
[STG13 - Distanzregelung] >
[Zugriffsberechtigung-16]
Als erstes die S56789, und danach die 20103 eingeben. >
Nun folgende Anpassungskanäle wählen und jeweils den Wert [0.00] speichern. Auch wenn dort bereits [0.00] drin steht, einfach den Wert neu eingeben und speichern!
STG13 - Distanzregelung > Anpassung >
- ENG253006-MAS13427-Korrekturwinkel-Horizontaler Korrekturwinkel dynamisch
- ENG253006-MAS13428-Korrekturwinkel-vertikaler Korrekturwinkel dynamisch
- ENG253006-MAS13429-Korrekturwinkel-Horizontaler Korrekturwinkel aktuell
- ENG253006-MAS13430-Korrekturwinkel-vertikaler Korrekturwinkel aktuell
- ENG253002-Misalignment_angle_horizontal_adaption
- ENG253003-Misalignment_angle_vertical_adaption
¶ Probefahrt
Nun eine Strecke von ca 15 - 20km fahren, dabei sollte Verkehr sein, damit der Sensor die Korrekturwinkel neu berechnen kann. Nach der Probefahrt die Werte prüfen.
Der Winkel darf dabei zwischen 0,80° und -0,80° liegen, sollte das System ausserhalb der Wert sein muss der Sensor neu ausgerichtet werden.
¶ 3Q0 907 572 - Kalibrierung (Experimentell)
--- IN ARBEIT---
Bei Interesse bitte Rücksprache mit dem VCDS.de Support.
¶ 5Q0 907 572 - Dynamische Kalibrierung
Die Dynamische Kalibierung ist erst ab Software 0620 (Index H) und H10 verfügbar. Alle Systeme davor können nur statisch Kalibriert werden!
[STG13 - Distanzregelung] >
Zugriffsberechtigung: S23456 >
[STG13 - Distanzregelung] >
Zugriffsberechtigung: 20103 >
Nun folgende Anpassungskanäle wählen und jeweils den Wert [0.00] speichern. Auch wenn dort bereits [0.00] drin steht, einfach den Wert neu eingeben und speichern!
[STG13 - Distanzregelung] >
[Anpassung-10] >
- IDE11924-MAS13427-Korrekturwinkel-Horizontaler Korrekturwinkel dynamisch
- IDE11924-MAS13428-Korrekturwinkel-vertikaler Korrekturwinkel dynamisch
- IDE11924-MAS13429-Korrekturwinkel-Horizontaler Korrekturwinkel aktuell
- IDE11924-MAS13430-Korrekturwinkel-vertikaler Korrekturwinkel aktuell
- IDE08936-Dejustagewinkel horizontal
- IDE09906-Dejustagewinkel vertikal
¶ Probefahrt
Nun eine Strecke von ca 15 - 20km fahren, dabei sollte Verkehr sein, damit der Sensor die Korrekturwinkel neu berechnen kann. Nach der Probefahrt die Werte prüfen.
Der Winkel darf dabei zwischen 2,00° und -2,00° liegen, sollte das System ausserhalb der Wert sein muss der Sensor neu ausgerichtet werden.
Aber erfahrungsgemäß sollte der Wert zwischen 1,00° und -1,00° liegen, um das beste Ergebnis zu bekommen. In diesem Fall muss der Sensor mechanisch neu ausgerichtet werden.
¶ 5Q0 907 572 - Statische Kalibrierung
¶ Vorbereitung
- Kalibrierspiegel oder stabile (gerade) Wand
- Fahrzeug 1,2m (±2,5cm) von Kalibrierziel entfernt aufstellen. Wichtig ist dabei die Distanz Sensor zum Ziel!
[STG13 - Distanzregelung] >
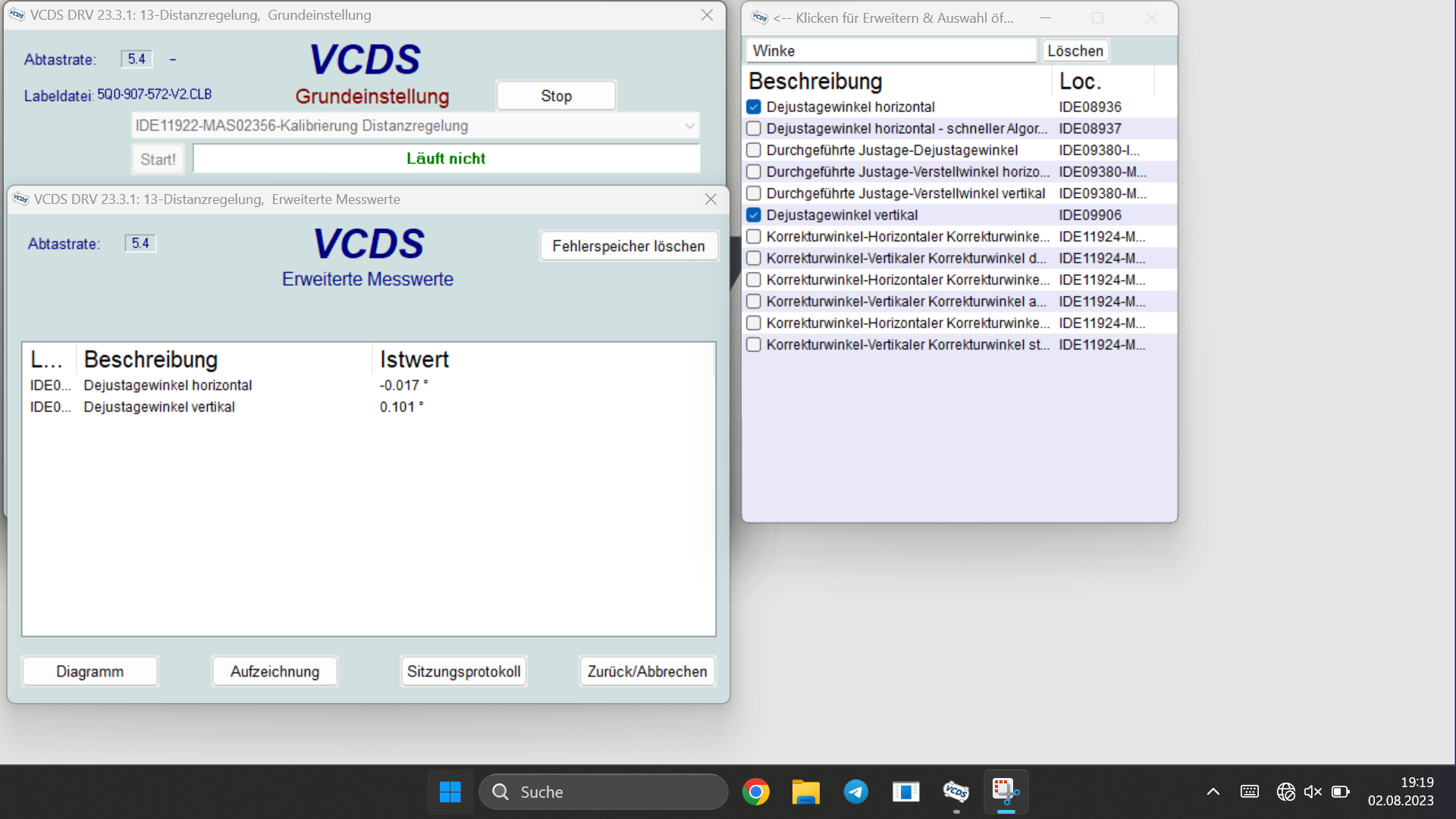
[Grundeinstellung] >
IDE11922-MAS02356-Kalibrierung Distanzregelung
Zusätzlich noch [Messwerte] >
- IDE08936-Dejustagewinkel horizonztal
- IDE09906-Dejustagewinkel vertikal
Nun die Grundeinstellung mit [Start] beginnen. Hier sollte [Läuft] erscheinen und nach ein paar Sekunden auf [Läuft nicht] umspringen. Danach werden die kalibrierten Werte in den Messwerten angezeigt.
Nun an den Stellschrauben entsprechend der Wert verstellen:
- Stellschraube links oben = überwiegend Vertikale Verstellung
- Stellschraube rechts unten = Überwiegend horizontale Verstellung
Nachdem man an der Stellschraube gedreht hat die Grundeinstellung wiederholen und die Werte prüfen.
Den Vorgang so lange wiederholen bis die Wert nach an 0.00° sind.
Der Sensor lässt je nach Firmware Toleranzen von maximal 1,.00° - 1.50° zu. Trotzdem sollte der Wert nach Möglichekeit eher in Richtung 0° sein
Nun den Fehlerspeicher löschen und eine Probefahrt von ca 15 - 20km durchführen
¶ Probefahrt
Nun eine Strecke von ca 15 - 20km fahren, dabei sollte Verkehr sein, damit der Sensor die Korrekturwinkel neu berechnen kann. Nach der Probefahrt die Werte prüfen.
Der Winkel darf dabei zwischen 3,00° und -3,00° liegen, sollte das System ausserhalb der Wert sein muss der Sensor neu ausgerichtet werden.
¶ 7N0 907 572 - Statische Kalibrierung
--- IN ARBEIT ---
¶ Audi A8 4E (D3) - statisch kalibrieren (Experimentell!)
Wir übernehmen für das experimentelle Vorgehen keine Haftung. Dies obliegt der Person, die den Kalibirervorgang am Fahrzeug durchführt.
¶ Vorraussetzungen
- Fahrzeug ca. 120cm entfernt von einer Kalibriertafel/geraden Wand aufstellen
- Sensor fest verbaut
¶ Bedingungen Grundeinstellung
- Dejustagewinkel maximal 0,5°
- Fehlerspeicher leer (außer Fehler mit der Grundeinstellung)
¶ Vorgang
[STG 13 - Distanzregelung] >
[Grundeinstellung-04] >
[Gruppe 001] - Radarstrahlen (Rohwerte) > [EIN/AUS/Weiter] > 10sek warten > Beenden >
[Gruppe 002] - Justagewinkel > > [EIN/AUS/Weiter] > 10sek warten > Beenden >
[Gruppe 003] - Radarobjekt 1 (bei stehenden Fahrzeug) > [EIN/AUS/Weiter] > 10sek warten > Beenden >
[Gruppe 003] - Radarobjekt 2 (bei stehendem Fahrzeug) > [EIN/AUS/Weiter] > 10sek warten > Beenden >
Zündung für 2min ausschalten und Fahrzeug verschließen.
Nun eine Probefahrt machen und prüfen ob das System fehlefrei läuft.